October 11, 2017 weblog
A drone can shoot strings for perching and stabilizing
(Tech Xplore)—Getting a drone up in the air is only one step ahead for those who work on and study drones. The feats to accomplish further rest in how well they fly, self-balance, perch, land and, if used in numbers, how they may move in formation.
No surprise, then, that researchers, in engineering drones to last longer and navigate around obstacles, look to nature's creatures such as birds, bats, insects to explore how their mechanisms help for energy-efficient, precise flight control.
A new drone takes its inspiration from spiders and the results are most interesting.
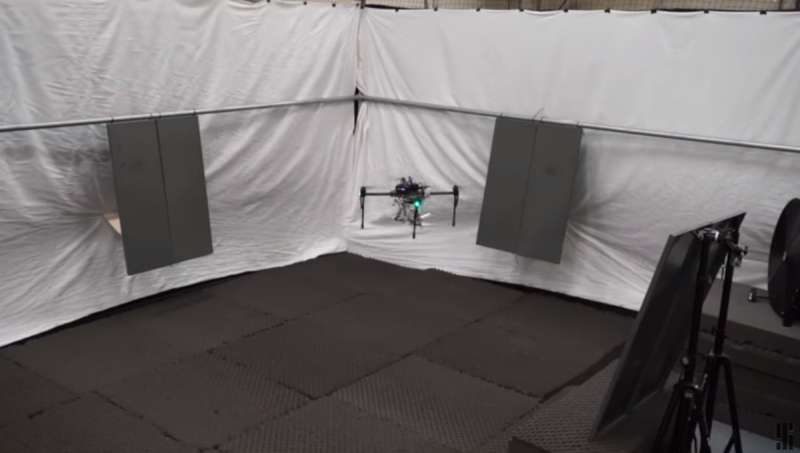
Introducing SpiderMAV: a micro aerial vehicle, specifically, a DJI Matrice 100 drone with customized perching module mounted on top, said IEEE Spectrum, and stabilizing module at the bottom.
The perching module consists of a magnetic anchor launcher and an actuated spooling system using polystyrene thread, the report said.
The drone is from Imperial College London's Aerial Robotics Laboratory. Their work was presented at IROS 2017.
Their paper is titled, "SpiderMAV: Perching and Stabilizing Micro Aerial Vehicles with Bio-inspired Tensile Anchoring Systems," by K. Zhang, P. Chermprayong, T. M. Alhinai, R. Siddall, and M. Kovac.
What's special about the drone and how does it mimic spiders? The answer is that the little vehicle shoots webs for perching and stabilization—such that it can hang from ceilings and perch.
And it does so wherever it needs to. "The SpiderMAV can shoot actual silk strings at walls in order to stabilize itself to perch against structures wherever necessary or convenient." said Marco Margaritoff in The Drive.
Evan Ackerman in IEEE Spectrum stepped readers through that process.
"When SpiderMAV finds a magnetic surface (a metal ceiling or beam, ideally) that it wants to perch beneath, the launcher uses compressed gas to fire the anchor, which trails the thread behind it. With the anchor attached, SpiderMAV reels in the thread to keep it taut, and then can slow or shut off its motors, hanging securely from the ceiling."
This is all being done while the drone is mid-air. And the feat is not limited to perching but to building infrastructure for it. "By using tensile anchors to support structures made of silk, spiders can create custom-stabilized perching locations that would otherwise not exist, because they're in mid-air."
The inspiration came from Darwin's bark spider. "It's inspired by the Darwin's bark spider that spins a circular web with anchor lines up to 25 meters (82 feet) long," said Steven Dufresne in Hackaday.
The perching aspect of their drone is quite important for those who explore drone endurance. Ackerman discussed this in his article.
"Perching is turning out to be a very desirable skill for aerial robots. The ability to land on walls or ceilings, rather than having to go to the ground, gives a drone the advantage of being high up in the air (probably why you're using a drone in the first place) without the disadvantage of having to spend a lot of energy not falling."
IEEE Spectrum posted videos earlier this month of the 1-SpiderMAV Outdoor Stabilization Test and 2-SpiderMAV: Micro Aerial Vehicles With Bio-inspired Tensile Anchoring Systems.
Why their work matters: According to Ackerman, "The researchers conclude by saying that SpiderMAV 'opens up a new trend in the field of robotics on investigating string-driven systems with active moving platform.'"
Moving forward, Marco Margaritoff in The Drive said "this drone is still very much in its early stages of development, with all of the aforementioned capabilities functioning well yet in preliminary testing phases."
More information: SpiderMAV: Perching and Stabilizing Micro Aerial Vehicles with Bio-Inspired Tensile Anchoring Systems, IROS 2017. ras.papercept.net/conferences/ … ontentListWeb_4.html
Abstract
Whilst Micro Aerial Vehicles (MAVs) possess a variety of promising capabilities, their high energy consumption severely limits applications where flight endurance is of high importance. Reducing energy usage is one of the main challenges in advancing aerial robot utility. To address this bottleneck in the development of unmanned aerial vehicle applications, this work proposes an bioinspired mechanical approach and develops an aerial robotic system for greater endurance enabled by low power station-keeping. The aerial robotic system consists of an multirotor MAV and anchoring modules capable of launching multiple tensile anchors to fixed structures in its operating envelope. The resulting tensile perch is capable of providing a mechanically stabilized mode for high accuracy operation in 3D workspace. We explore generalised geometric and static modelling of the stabilisation concept using screw theory. Following the analytical modelling of the integrated robotic system, the tensile anchoring modules employing high pressure gas actuation are designed, prototyped and then integrated to a quadrotor platform. The presented design is validated with experimental tests, demonstrating the stabilization capability even in a windy environment.
© 2017 Tech Xplore
















